-
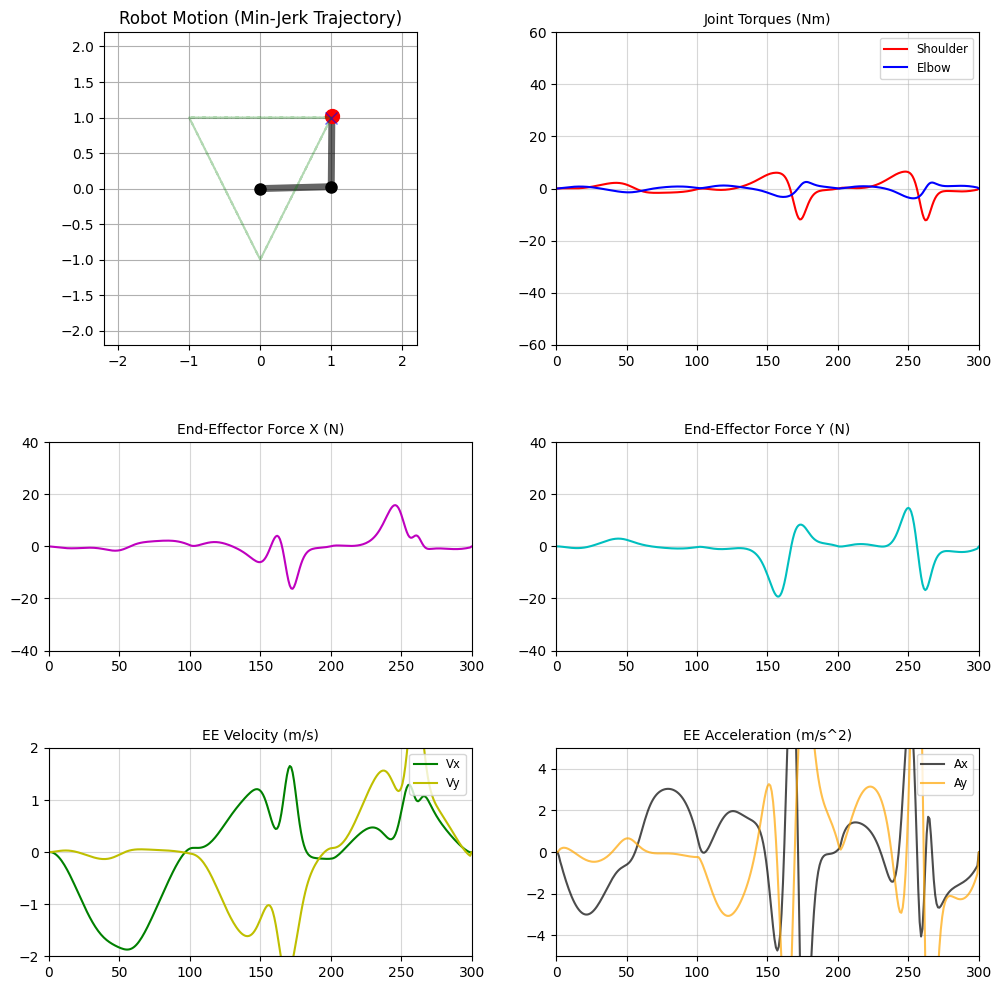
[Part2] Planning for Interaction: The Trajectory Generation of End-Effector
Minimum Jerk Trajectory Generation
-
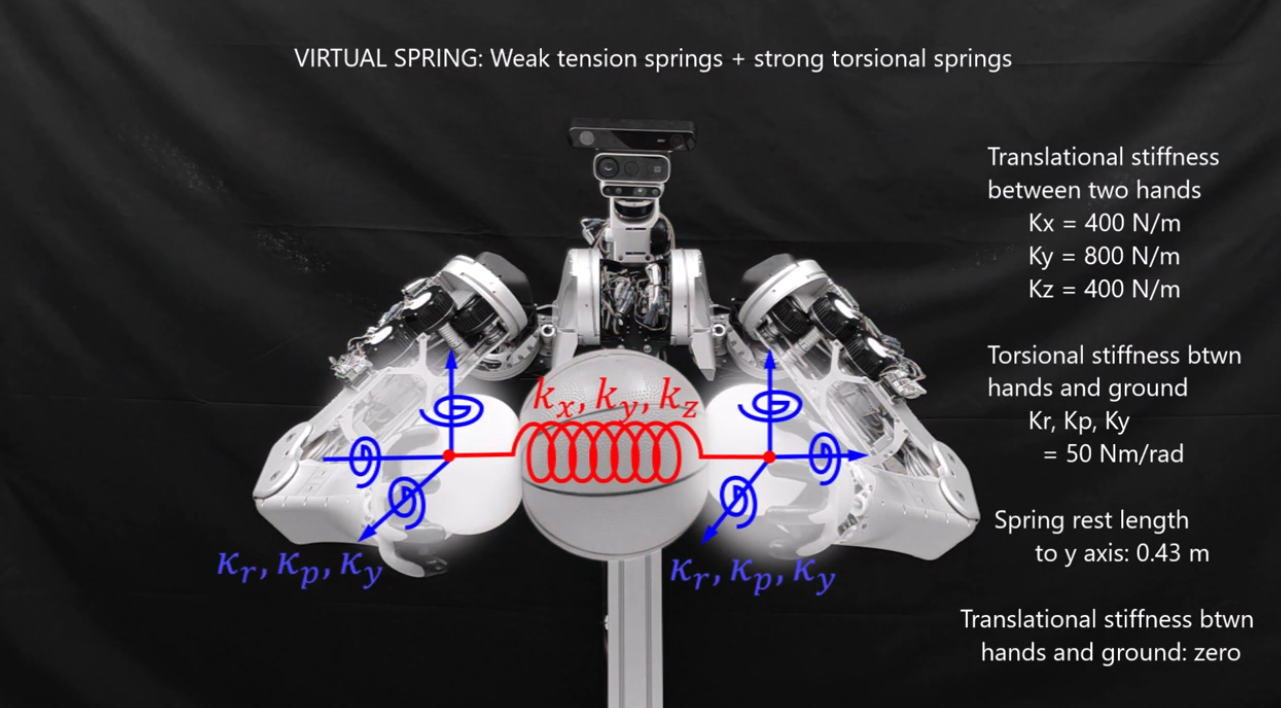
[Part1] Beyond Position Control: The Philosophy of Interaction
Cartesian-Space Impedance Control for compliance
-
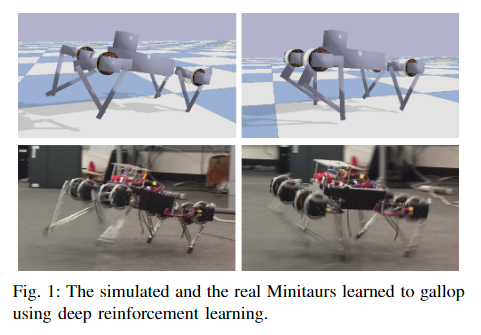
Paper Review: "Sim-to-Real: Learning Agile Locomotion For Quadruped Robots"
Focusing on the factors that impacts to sim-to-real gap
-
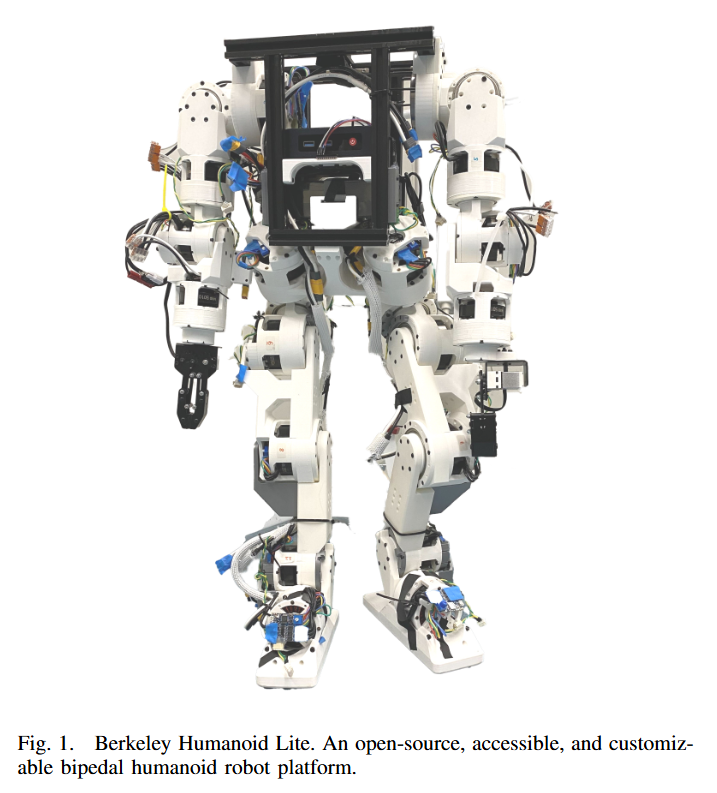
Paper Review: "Demonstrating Berkeley Humanoid Lite: An Open-source, Accessible, and Customizable 3D-printed Humanoid Robot"
Focusing on Actuator Design & Evaluation Process
-
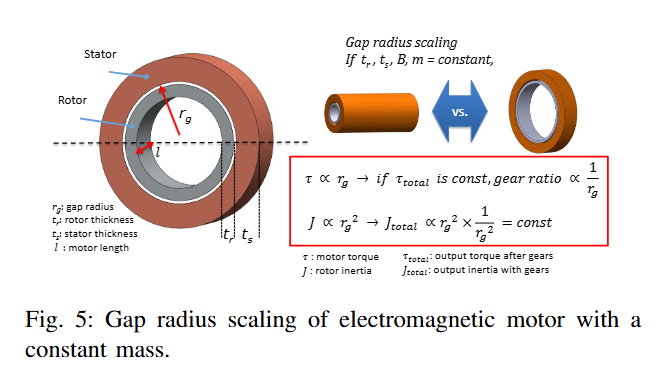
Paper Review: "Design Principles for Energy Efficient Legged Locomotion and Implementation on the MIT Cheetah Robot"
Focusing on Actuator Design & Energy Flow Cycle
-
A Cycloidal Quasi-Direct Drive Actuator Design, Fabrication and Control
Cycloidal-QDD Actuator, Customized BLDC Motor, FOC Controller, High Backdrivability, Responsiveness and High Dynamics & Agility

-
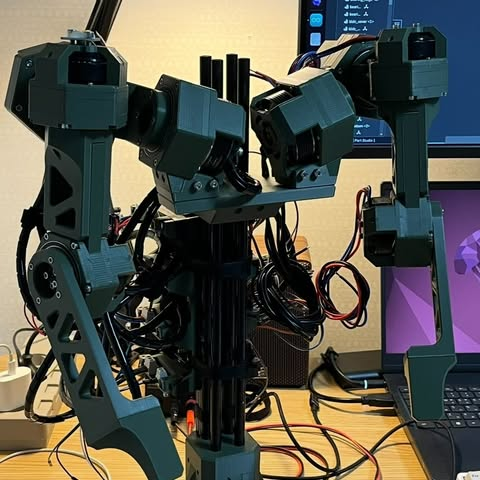
Applications of A Proprioceptive Actuator:3DoF Robotic Arm & Humanoid Upper Body Robot through Impedance Control
This is an extension of my previous project, 'A Low-Cost Modular 3D-Printed Proprioceptive Actuator for HRI'
-
A Low-Cost Modular 3D-Printed Proprioceptive Actuator for HRI
10:1 ratio Reducer, BLDC Motor, FOC Controller and Proprioceptive Sense
